










Our goals
To study the mechanical, physiological, neurological, psychological and sociological determinants of the motricity of living beings, human in particular.
Research teams
- PSNM : Plasticity of Muscular and Nervous Systems
- AdapJuste : Adaptations and Adjustments to external and internal constraints
- DCI :Behavioral Dynamics and Immersion team
- ICS : Interactions between Cognitive and Sensorimotor Behaviors
- CMC : Context, Motivation and Behaviors
- P3M : Motor Performance and Multiscale Modelling
- BIOROB : Biorobotic
- GIBOC : Interdisciplinary Group in Osteoarticular Biomechanics
- CBI : Bio Inspired Design
Seminars and events
Effets secondaires, charge cognitive et stress en réalité virtuelle (salle des thèses)
Alexis SOUCHET (IRT SystemX), invité par F. Sarlegna
Bio-Inspired joint design: Exploiting Morphogenesis and Evolutionary Adaptations of Synovial Joints
Kalenia MARQUEZ-FLOREZ (Postdoc Equipe SBI); Amphi FSS
Abstract:
Synovial joints have evolved in shape, dimensions, and tissue characteristics to endure a lifetime of load cycles while minimizing energy loss. Why not draw inspiration from these joints for mechanical design? Given that tissue characteristics are virtually uniform across all taxa and joints, it is the geometry (shape and dimensions) that adapts to the locomotion of each animal. In this talk, I will discuss how we explore the geometrical design principles of synovial joints to apply them to engineering joint design. For shape, we developed a generative design methodology inspired by the synovial joint morphogenesis process to shape contacting surfaces. In this process, cartilaginous bone rudiments grow locally, guided by hydrostatic and shear stress distributions. By mimicking these growth rules in an engineering context, we observed that it is viable to adapt contact surfaces to ensure uniform pressure distribution. Regarding dimensions, we formulated engineering joint sizing guidelines based on biological joint allometry. This involved analyzing the distal humerus dimensions of 110 quadrupedal animals and correlating them with the dynamic conditions experienced during galloping. Our findings indicate that joint dimensions have evolved across taxa to maintain consistent pressure, sliding speed, and fluid film lubrication, which are beneficial for tissue maintenance. This work provides insights into natural joint function, guiding the design of bio-inspired joints.
Acceptabilité des technologies de promotion de l’activité physique chez des populations vulnérables
Meggy Hayotte (Université Côte d'Azur, LAMHESS)
Les recherches de Meggy Hayotte (MCF, Université Côte d'Azur, LAMHESS) portent sur la promotion de l'activité physique à des fins de santé par les technologies auprès des populations vulnérables (e.g., patients atteints d'obésité, seniors). Ses travaux ont exploré les technologies visant à promouvoir l'activité physique selon deux axes : (a) les mécanismes d'acceptabilité des technologies (e.g., les mécanismes basés sur l'Unified Theory of Acceptance and Use of Technology-2 et enrichis par l'intégration de facteurs motivationnels issus de la théorie de l'autodétermination), et (b) les conditions d'efficacité de la technologie (e.g., les techniques intégrées de changement de comportement). L'objectif de cette présentation sera de présenter un bref historique des modèles d'acceptabilité des technologies, avec un focus particulier sur l'Unified Theory of Acceptance and Use of Technology-2, puis de présenter comment ce modèle peut être mobilisé dans le contexte de la promotion de l'activité physique à des fins de santé chez un public vulnérable, avant de conclure par des perspectives de recherche dans ce domaine.
De l'utilisation des coordinations sensorimotrices pour une assistance robotique intuitive et écologique au geste (Salle des thèses FSS)
Nathanaël Jarrassé (ISIR, Sorbonne/CNRS), invité par Jozina De Graaf
Titre: De l'utilisation des coordinations sensorimotrices pour une assistance robotique intuitive et écologique au geste
Les robots sont des outils prometteurs pour assister les gestes humains, qu'ils soient ceux d'un utilisateur handicapé ou d'un opérateur dans l'industrie. Si des progrès importants ont été réalisés au cours des dernières décennies sur la partie matérielle de ces dispositifs robotiques, il reste un défi essentiel : offrir aux utilisateurs un contrôle intuitif et écologique de l'assistance de leur corps par ces dispositifs. Dans cet exposé, je présenterai donc des recherches que nous menons sur la caractérisation des coordinations motrices naturelles et leur réorganisation induite par une déficience ou l'interaction avec des robots ; et comment ces connaissances peuvent être utilisées pour développer une meilleure commande des robots de rééducation et d'assistance.
Site de N. Jérassé (ISIR, Sorbonne): https://www.n-jarrasse.fr/
Behavioral, Neuropsychological, and Computational Perspectives on Sensorimotor Learning (Salle des thèses FSS)
Jonathan Xiao Tsay (Carnegie Mellon, USA) invité par F. Sarlegna
Abstract:
Humans are remarkably adept at learning to use their bodies in a coordinated manner. Understanding how we acquire, adapt, and retain motor skills is one of the principal goals of cognitive neuroscience and remains a defining challenge for robotics and clinical rehabilitation. While it is well established that sensorimotor learning entails multiple implicit and explicit processes, the underlying computations and neural substrates governing these processes remain poorly understood. Drawing on my research ranging from fine-grain sensorimotor psychophysics to large-scale crowdsourced datasets (test yourself here: multiclamp-c2.web.app), I will highlight core neuropsychological constraints and novel computational insights into sensorimotor learning. This body of work offers a fresh perspective regarding the cerebellum’s role in cognition and action and has motivated a new hypothesis concerning how the cerebellum coordinates both our physical and mental kinematics.
Bio: I am an incoming assistant professor of psychology at Carnegie Mellon University (Sep 2024). I have a background in theoretical mathematics (B.A. from Northwestern University), physical rehabilitation (D.P.T. from Northwestern University's Feinberg School of Medicine), and cognitive neuroscience (Ph.D. from UC Berkeley). Our lab's mission is to understand how humans master a near-limitless repertoire of movements, from brewing coffee to parallel parking. To achieve this, we will use a wide range of methods like computational modelling, psychophysics, patient testing, and neuroimaging. We expect our findings to not only generate new insights into learning and memory but also optimize rehabilitation and improve human performance.
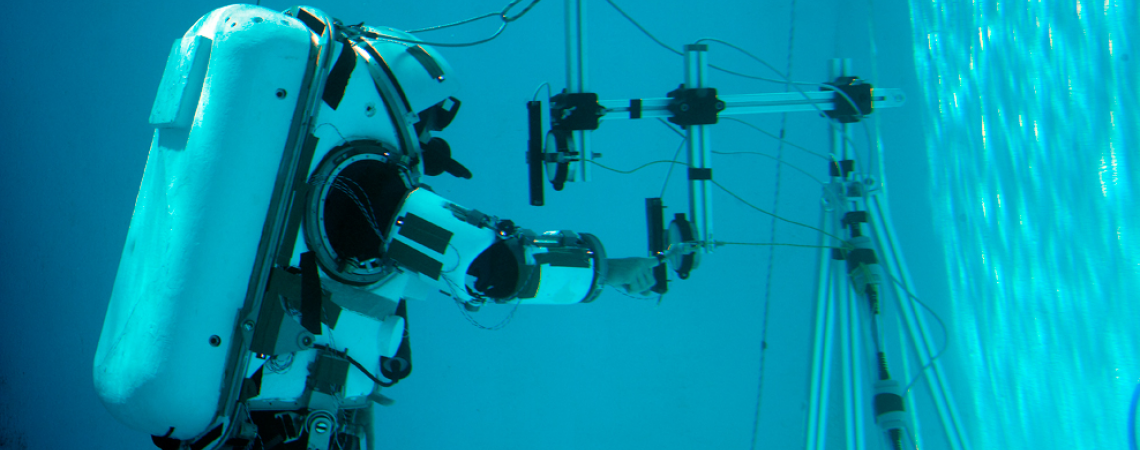
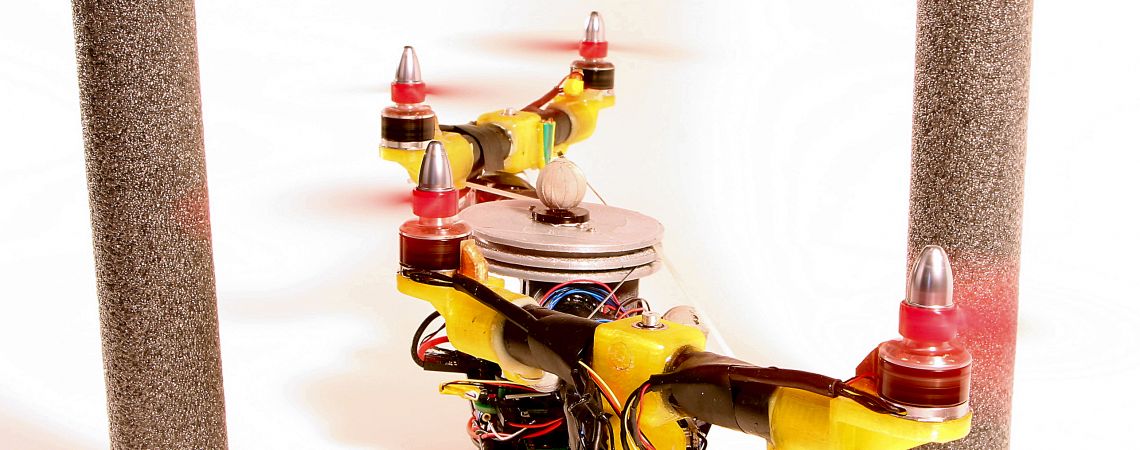
Robotique aérienne et interaction physique (Salle des thèses FSS)
Arda Yigit (postdoc Nantes), invité par F. Ruffier
Abstract : Dans la première partie de la présentation, j'aborderai mes travaux antérieurs, en particulier le robot aérien que j'ai développé lors de ma thèse et les robots parallèles collaboratives sur lesquelles j'ai travaillé lors de mon postdoctorat au Canada. Par la suite, je présenterai mon projet de recherche sur les robots aériens passivement reconfigurables.
Skeletal-Biomechanics - from fundamental research to biomimetic applications (Salle des thèses FSS)
Jan-Henings DIRKS (Hochschule Bremen - City University of Applied Sciences), invité par S. Arroyave-Tobon
Short Abstract
Many skeletal structures show fascinating evolutionary adaptations to all kinds of biomechanical challenges. Understanding the fundamental principles of these adaptations can be of great interest for bio-inspired applications. In this presentation I will show several examples of our recent work on various parts of the insect exoskeleton and the starfish skeletal system and discuss the importance of fundamental research for biomimetic projects.
Outils et Méthodes pour l'étude du comportement des conducteurs
Stéphane Espié (SATIE/MOSS, Gustave Effeil Univ.), invité par G. Perrotte
RÉSUMÉ :
La compréhension du comportement des conducteurs est un pré-requis pour la conception de contre-mesures de sécurité routières efficaces car acceptées. La conception d'outils utilisables pour étudier et modéliser le comportement des conducteurs est donc un enjeu important. La question est non seulement de reproduire les comportements actuels mais aussi d'anticiper sur ceux qui pourraient apparaître dans le futur suite à des changements dans le contexte de conduite.
L'instrumentation de véhicules et les tests sur route et / ou circuits est l'une des options, l'usage de simulateurs de conduite en est une autre. Dans tous les cas la question posée concerne la validité des outils utilisés, outils qui ne doivent pas biaiser les comportements observés.
La modélisation et la simulation des comportements de conduite peut être réalisée par des méthodes de régression ou d'émergence, la question de la simulation de situations "futures" (i.e. pour lesquelles il n'existe pas de données actuellement) est une question ouverte qui pose celle de la mise au point et de la validation des dispositifs de sécurité "futurs".
Dans notre présentation nous discuterons des outils et méthodes que nous utilisons et/ou développons dans le contexte spécifique aux deux roues motorisés. Nous discuterons bien sûr de leur application aux autres types de véhicules.
Caractérisation in vitro / in vivo du tissu musculaire
Sabine Bensamoun (Lab Biomécanique et Bioingénierie, UTCompiègne, Mayo Clinic Foundation), invité par M. Pithioux
Le muscle strié squelettique a une composition hiérarchique complexe. Pour mieux comprendre les liens entre les différentes échelles (macroscopique : muscle entier ; microscopique : fibre ; sous-microscopique : myofibrille) des protocoles expérimentaux sont développés pour mesurer les propriétés mécaniques (passive et active). Des muscles (lent : soleus ; rapide : EDL) extraits de souris saines et dépourvues du gène KLF10 (aussi appelé TIEG1 : TGFb Inducible Early Gene-1) sont analysés. Le gène KLF10 est impliqué dans plusieurs pathologies (ostéoporose, cardiomyopathie, ...), et bien que ce gène soit fortement exprimé dans le muscle squelettique, son implication dans le développement, la réparation ou la fonction musculaire est peu exploré. Nos récents résultats, sur l’impact de l’invalidation du gène KLF10 dans le muscle squelettique, ont montré un rôle crucial dans le maintien de l’homéostasie, la structure et la fonction des muscles squelettiques.
En parallèle à ce travail fondamental, les propriétés mécaniques in vivo des muscles de la cuisse (sain et pathologique : myopathie de Duchenne) ont été déterminées en développant des protocoles expérimentaux avec l’élastographie par résonance magnétique (ERM). Cette technique est basée sur l’analyse de la vitesse de déplacement des ondes au sein des tissus mous. En plus de l'acquisition des images anatomiques obtenues en IRM, la technique ERM permet de quantifier les propriétés mécaniques (élasticité, viscosité) du muscle. Les résultats ont montré une variation des propriétés mécaniques en fonction du vieillissement musculaire et en fonction de l’état du muscle (relâché ou contracté). Cette caractérisation par ERM permet de mieux comprendre l’évolution des propriétés mécaniques du muscle et de mieux adapter la modélisation de son comportement mécanique dans différentes situations physio-pathologiques.
Etudier la locomotion des primates non-humains en contexte expérimental : contexte, possibilités, limites (Salle des thèses FSS)
F. Druelle (Musée Histoire Naturelle Homme Préhistorique, UMR 7194), invité par L. Vigouroux
Résumé : Les performances locomotrices jouent un rôle majeur dans l’adaptation et la survie des espèces. Elles représentent également des sujets d’intérêt pour la médecine et le sport. Mieux les comprendre est donc un défi majeur, porteur d’enjeux importants pour les sociétés humaines. L’anthropologie biologique s’intéresse à l’humain dans sa dimension évolutionnaire et biologique large. Elle interroge donc l’origine de notre espèce au sein du clade auquel nous appartenons, les primates. La question de l’évolution de notre appareil locomoteur, très spécialisé par rapport aux autres primates, est un sujet d’actualité et de grand intérêt pour la recherche fondamentale. Notre compréhension de la transition évolutionnaire depuis des primates quadrupèdes généralistes vers des hominines bipèdes spécialisés reste limitée. Ce contexte nécessite donc d’étudier les espèces qui sont les plus proches de nous pour dépeindre une image plus holistique de l’évolution de nos performances locomotrices. L'utilisation d'animaux coopératifs qui peuvent se déplacer librement dans une configuration expérimentale nous permet de collecter des données précieuses et pertinentes, les rendant ainsi reproductibles et comparables entre les espèces. Néanmoins, à ce jour, l'utilisation de techniques dites de renforcement positif pour étudier la locomotion des primates non humains reste peu développée. Sur la base des connaissances actuelles et de l’expérience que j’ai acquise depuis mes premiers travaux sur les primates non-humains, je présenterai ici une approche expérimentale qui vise à atteindre les standards de l'étude du mouvement humain chez un primate non humain, le babouin olive, Papio anubis, grâce à l'utilisation de techniques de renforcement positif. Je présenterai le contexte du protocole d’entraînement qui a été mis en place à la Station de Primatologie du CNRS à Rousset (France), les possibilités offertes par de tels protocoles et leur limite. Je présenterai les résultats de nos études sur l’activité musculaire notamment pendant la marche quadrupède, bipède et le grimper chez les babouins.
Acting upon and acting with: from object handling and tool use in healthy and pathological populations to perspectives on assistive technology for the upper limb
R. Parry (LNIP2, Univ. Paris Nanterre), invité par F. Sarlegna (Salle des thèses)
Summary:
Hand-object interactions are a central component to our daily life activities. In addition to this, humans are rather particular in that they regularly appropriate tools to expand their physical capacity to effect change upon the environment. Supporting human performance in object handling thus represents an important objective in various domains including ergonomics and rehabilitation. This seminar presents a series of experimental findings spanning foundational aspects of the perceptuomotor capacities involved in object handling and tool use, as well as certain particularities which may emerge in the context of neurological disease. In particular, this work underscores the importance of an implicit sensitivity to the reciprocal mechanical constraints which exist between the object and the upper-limb according to the task objectives. The potential implications of this are further examined in relation to the development of assistive technology with specific examples provided from ongoing experimental work on the use of vibrotactile matrices and upper-limb exoskeletons.
Short bio:
Ross Parry is an assistant professor at Université Paris Nanterre. Following several years of clinical practice as an occupational therapist, he currently works in the movement neuroscience and psychology laboratory, LINP2 (Laboratoire Interdisciplinaire en Neurosciences, Physiologie et Psychologie). Ross has a keen interest in neurological rehabilitation, movement analysis techniques, and the use of new technologies for improving health and productivity. More specifically, his work focuses on developing functional approaches to motor control which enable understanding of human dexterity and locomotion in relation to task constraints and the surrounding environment. This research program seeks to advance basic understanding of the nervous system while consolidating new approaches for mobilising assistive technology, enhancing human-machine interactions, and improving outcomes in rehabilitation.
Active Vision: bees tell us where to look - elegant & simple solutions to complex problem-solving (Amphi FSS)
Dr. Marie-Geneviève Guiraud (Université Macquarie, Australie), invité par J. Serres
Summary: More and more studies are emerging about the amazing learning capabilities of our favourite pollinators. These studies have led many animal researchers to believe that bees can easily acquire abstract concepts and numerical abilities, for example. However, our work proves that there are other ways to account for the results of these relevant studies. In this talk, I will weigh in on this debate, presenting behavioural and tracking data (2D and 3D) of bees engaged in solving different visual puzzles. Whether they are trained to solve very simple discrimination tasks (triangle versus square), tasks with changing targets or complex discrimination tasks (human faces), their movement in space (active vision) seems to be the best indicator of their learning performance and the saliency of the visual components used for recognition and memorisation. This work emphasizes on the importance of paying attention to the specific kind of visual and navigational strategies that bees use to succeed at these tasks and implement a more rigourous approach for neuro-cognition using video-recording and analysis in order to draw more precise conclusions. For instance, with training, bees can learn to attend only a fraction of visual stimuli instead of whole stimuli. They will follow edges and look for anything that allows them to simplify rule-learning. What else can we learn from following their wings-steps?
Dr. Marie-Geneviève Guiraud - post-doc à l'Université Macquarie (Australie)
https://scholar.google.com/citations?hl=fr&user=Uq6GZdMAAAAJ&view_op=list_works&sortby=pubdate
"Perception des éoliennes par les oiseaux", avec une ouverture vers la perception du mouvement par les oiseaux (Amphi FSS)
Dr Constance BLARY, Centre for Functional and Evolutionary Ecology (CEFE - UMR 5175), invitée par J. Serres
Dr Constance BLARY, Centre for Functional and Evolutionary Ecology (CEFE - UMR 5175), Montpellier
"Après une formation d'ingénieure agronome, complétée par un master en éthologie-écologie, j'ai poursuivi mon cursus en thèse de doctorat au CEFE (Centre d'Écologie Fonctionnelle et Évolutive), sous la direction d'Olivier Duriez et de Francesco Bonadonna. Mes recherches se sont concentrées sur la perception visuelle des éoliennes par les oiseaux, dans le cadre du programme français MAPE (réduction de la Mortalité Aviaire dans les Parcs Éoliens). Les résultats de ma thèse ont conduit à la proposition de motifs visuels pour les éoliennes visant à réduire les collisions aviaires. J'ai donc poursuivi ces recherches en post-doctorat afin d'évaluer expérimentalement, en milieu contrôlé, l'efficacité de ces motifs. Aujourd'hui, en fin de post-doctorat, je souhaite continuer à explorer la perception du mouvement par les oiseaux, et leur utilisation des éléments du paysage en mouvement apparent pour naviguer dans leur environnement."
"After training as an agricultural engineer, supplemented by a master's degree in ethology-ecology, I continued my studies with a doctoral thesis at CEFE (Centre d'Écologie Fonctionnelle et Évolutive), under the supervision of Olivier Duriez and Francesco Bonadonna. My research focused on the visual perception of wind turbines by birds, as part of the French MAPE program (reducing avian mortality at wind farms). The results of my thesis led to the proposal of visual patterns for wind turbines aimed at reducing avian collisions. I pursued this research as a post-doctoral fellow in order to experimentally evaluate the effectiveness of these patterns in a controlled environment. Now, at the end of my post-doctorate, I'd like to continue exploring birds' perception of movement, and their use of apparently moving landscape elements to navigate in their environment."
Summary/Résumé
"La vulnérabilité des oiseaux aux collisions avec les éoliennes, en particulier les rapaces et les grands planeurs, est une préoccupation urgente. Alors que des facteurs tels que l'emplacement des installations éoliennes et le comportement de vol contribuent à cette mortalité, les causes sous-jacentes restent incertaines. Les résultats des différentes études réalisées pendant ma thèse de doctorat ont menés à trois hypothèses pouvant expliquer les collisions des oiseaux avec les éoliennes. Premièrement, les oiseaux peuvent avoir du mal à détecter les éoliennes en raison d'une sensibilité aux contrastes achromatiques limitée. Deuxièmement, même si les oiseaux perçoivent les éoliennes, ils peuvent ne pas détecter le mouvement rotatif des pales. Enfin, même s'ils détectent la rotation des pales, les oiseaux peuvent prendre le risque de traverser la zone balayée par les pales. Les solutions de réduction de la mortalité aviaire existantes mises en place au niveau des parcs éoliens de ne sont pas optimisées, car envisagées depuis le point de vu humain. En prenant le point de vue des oiseaux, et en considérant leurs sensorielles, des améliorations prometteuses de ces dispositifs sont envisageables."
"The vulnerability of birds to collisions with wind turbines, particularly raptors and large gliders, is an urgent concern. While factors such as the location of wind turbine installations and flight behavior contribute to this mortality, the underlying causes remain uncertain. The results of the various studies carried out during my doctoral thesis led to three hypotheses that could explain bird collisions with wind turbines. Firstly, birds may have difficulty detecting wind turbines due to their limited sensitivity to achromatic contrasts. Secondly, even if birds perceive wind turbines, they may not detect the rotating motion of the blades. Finally, even if they do detect the rotation of the blades, birds may take the risk of crossing the area swept by the blades. Existing solutions for reducing bird mortality at wind farms are not optimized, as they are viewed from a human perspective. By taking the birds' point of view, and considering their sensory ecology, promising improvements to these devices are conceivable."
Neurocognitive correlates of writing acquisition and practice: insights from biscriptuality (Amphi FSS)
Dr Gaelle Alhaddad & Marieke Longcamp (CRPN)
Gaelle Alhaddad & Marieke Longcamp (CRPN), invitées par F. Sarlégna
Writing is a complex linguistic and motor skill that requires years of training to be fully mastered. In the first part of the talk, we will give an overview of our approach of the cognitive and neural correlates of writing acquisition and practice. In the second part of the talk we will focus on the study of biscriptuality, a specific case of writing practice. Biscriptuals are trained to write at an early age in two different scripts. Compared to monoscriptual training, biscriptual training imposes stronger constraints on motor and executive functions. We will describe several experiments suggesting that such constraints could have long-term consequences on graphomotor control and motor behavior at large. These data contribute to our understanding of how writing skills become grounded in the brain.
Proprioception et tact : intégration corticale dans le contrôle postural (Amphi FSS 13-14h)
Marie Fabre (ATER en neurophysiologie)
Marie Fabre (ATER en neurophysiologie) ISM
titre: Proprioception et tact : intégration corticale dans le contrôle postural
Résumé
Tout mouvement est le résultat d’interactions entre : les informations sensorielles périphériques, les représentations du corps et les mécanismes centraux, notamment dans le maintien de l’équilibre et la locomotion. Ces tâches motrices dépendent ainsi de différentes informations sensorielles tel que la vision, la proprioception, le tact et les informations vestibulaires.
Dans un premier temps, , je me suis focalisée sur les informations tactiles plantaires car la sole plantaire est l’interface directe entre la surface d’appui en position debout et le corps. Ces informations tactiles plantaires sont médiées par des mécanorécepteurs tactiles répondant à différentes déformations mécaniques de la peau, notamment à la pression. La pression appliquée sur la sole plantaire va calibrer la quantité d’informations sensorielles tactiles disponibles pour la mise à jour des représentations du corps dans l’espace et le maintien de l’équilibre. Or, selon les oscillations posturales du corps en position debout etle poids, cette pression peut varier et peut être optimisée. Nous avons ainsi évalué les interactions entre les afférences sensorielles tactiles plantaires et les mécanismes corticaux dans différents cas : 1/ différences entre large et faible oscillations posturales dans une population saine 2/patients obèses (surpression sur la sole plantaire) 3/ patients avec perte vestibulaire (compensation tactile). Dans ce sens nous avons analysé le contrôle postural (mesure du déplacement du centre de pression et du centre de masse), l’activité corticale (électroencéphalogramme) et l’activité musculaire (électromyogramme) 1/ pendant les larges et faibles oscillations 2/ chez des patients obèses sans et avec allègement de poids du corps dans un système AlterG 3/ chez des patients avec perte vestibulaire avec et sans système de compensation tactile.
Dans un deuxième temps, je me suis davantage focalisée sur la proprioception dans le maintien de l’équilibre et la locomotion et notamment comment optimiser l’intégration des informations proprioceptives. En effet, il est possible de solliciter spécifiquement les récepteurs proprioceptifs via deux techniques de stimulations (respectivement mécanique et électrique) : la vibration localisée et la stimulation électrique somato-sensorielle. Ces deux techniques ont déjà démontré des effets positifs sur la proprioception et le contrôle postural. Ainsi nous avons comparé chez des personnes âgées en bonne santé et des enfants atteints de paralysie cérébrale l'efficacité de 4 différents types d’interventions de 8 semaines : exercices posturaux seuls, ou combinés à l’utilisation des stimulations proprioceptives (vibration, stimulation électrique, ou association des deux). Pour cela nous avons analysé le contrôle postural, le contrôle de la force musculaire (enregistrement de la force sous-maximale maintenue), les capacités de marche (6MTW, TUG, 10MTW) et les adaptations nerveuses sous-jacentes chez les personnes âgées seulement (potentiels moteurs évoqués par TMS, réflexe H) avant et après interventions.
Nous rejoindre
Lien vers nos offres
Appels à projet
News
-
 Entrepreneuriat dans la Silver Economie (Rita Sleimen et Jean-Jacques Temprado)
Entrepreneuriat dans la Silver Economie (Rita Sleimen et Jean-Jacques Temprado)Rita Sleimen et Jean-Jacques Temprado organisent un colloque virtuel pendant le mois de la Silver Economie (Novembre) sur l'Entrepreneuriat dans la Silver Economie.
Il s'adresse à tous ceux qui veulent en savoir plus sur la silver économie et aux étudiants qui souhaitent développer un projet d'entreprise. Ce colloque vise également à attirer des étudiants vers le DU sur le même thème qui ouvrira en principe en Janvier 2024 (https://fss.univ-amu.fr/fr/entrepreneuriat-silver-economie).
5 conférences et table rondes programmées les mercredis de 17:30 à 19 h,
-
 Fête de la Science sur les ondes de Radio Grenouille ( Loic Chomienne)
Fête de la Science sur les ondes de Radio Grenouille ( Loic Chomienne)Écoutez ce podcast où vous pouvez retrouver Loïc Chomienne (Chercheur Post- Doctoral à l'Institut des Science du Mouvement) et le CRVM, qui ont partagé leurs expériences lors de la Fête de la Science sur les ondes de Radio Grenouille.
https://feeds.transistor.fm/les-sciences-de-la-grenouille/
-
 JNRR23
JNRR23Vous pouvez revoir ou regarder en direct ICI les conférences des JNRR23 (Journées Nationales de la Recherche en Robotique) qui se déroulent en ce moment du 15 au 20 octobre 2023 à Moliets dans les Landes. Plusieurs membres de l'ISM (Institut des Sciences du Mouvement) ont joué un rôle clé au sein du comité d'organisation, notamment sous la direction de Franck Ruffier.
https://www.youtube.com/@Institutdessciencesdumouvement/streams
-
 Course à pied : les « supershoes » permettent-elles de courir plus vite… sans danger ? (Guillaume Rao)
Course à pied : les « supershoes » permettent-elles de courir plus vite… sans danger ? (Guillaume Rao)Course à pied : les « supershoes » permettent-elles de courir plus vite… sans danger ?
Sur les cinq dernières années, la quasi-totalité des records du monde sur demi-fond, du 5 000 mètres au marathon, a été battue.
-
 Exposition : Science et sport, l’union fait la force (CNRS)
Exposition : Science et sport, l’union fait la force (CNRS)L'exposition « Sport et science, l’union fait la force » a été conçue par le CNRS en partenariat avec la RATP. Elle sera présentée sur le Village des sciences de Marseille les 14 et 15 octobre pour la Fête de la science.
-
 Le milieu du sport court-il toujours après l'égalité ? ( Maxime Travert )
Le milieu du sport court-il toujours après l'égalité ? ( Maxime Travert )Les stéréotypes de genre ont la peau dure dans le milieu du sport. Echangez avec Bénédicte Gastineau, Démographe de l'IRD au sein du LPED ; Maxime Travert, Professeur des universités en STAPS à Aix-Marseille Université (INSPE, ISM, AMU/CNRS) ; et Carla Cote, Emma Riouffret, Tiffany Verchère, sportives de haut niveau.
+d'infos ICI
rencontre au village des sciences de Marseille :
Dimanche 15 octobre, à 11 h
Place Bargemon, Hôtel de Ville de Marseille
-
 France 3 - Joe Kals et Neurogel en Marche (Patrick Decherchi)
France 3 - Joe Kals et Neurogel en Marche (Patrick Decherchi)Voici un reportage signé France 3 région Provence Alpes Côte d'Azur (PACA) Avec la présentation de JOE KALS et son combat pour faire avancer les choses à travers ses exploits sportifs. Vous trouverez aussi la présentation de l'association de recherche sur la moelle épinière neurogel en marche qui montre les résultats de l'essai pré-clinique réalisé à l'université d'Aix-Marseille .
-
 HDR - OLIVIER VORS
HDR - OLIVIER VORSRetrouvez la captation de la magnifique soutenance HDR de Olivier VORS ci dessous.
Pages
View or review






























![]()
![]()
![]()
Institut des Sciences du Mouvement Etienne-Jules Marey | Aix Marseille Université - Tous droits réservés - Mentions légales