Des capacités sensori-motrices nouvelles pour la robotique de demain
Thématiques
Notre projet s'insère dans un cadre lié à la perception active où le mot actif signifie ici que le mouvement est au service de la perception.
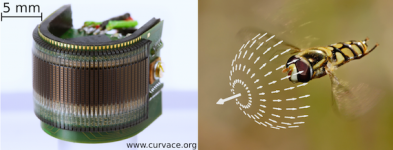
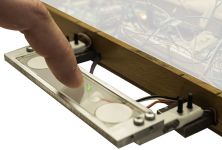
Il s'agit d’étudier ici des phénomènes impliquant, par exemple, un micro-mouvement de balayage visuel, un mouvement propre d'un robot aérien ou d'une abeille structurant le flux optique ou encore un mouvement propre du doigt en contact avec une surface texturée.
Nous comptons aborder l'étude de ces phénomènes selon notre démarche Biorobotique qui consiste à élucider puis à formaliser le fonctionnement de mécanismes sensori-moteurs naturels liés à la perception visuelle et tactile. Il s'agit ensuite de les mettre en oeuvre à bord de robots physiques bio-inspirés les mimant en partie ou autres interfaces haptiques qui, une fois confrontés à un environnement réel, sont aptes à confirmer ou à infirmer ces hypothèses de fonctionnement du vivant.
Notre ambition est ainsi d’utiliser la robotique pour faire avancer, par itération, la compréhension de ces nombreux mécanismes de perception active.
Mots-clés
Biorobotique; Vision; Toucher; Interface haptique; Robotique; Ethologie; Insecte; Capteur; Contrôle sensorimoteur