










Nos objectifs
Etudier les déterminants mécaniques, physiologiques, neurologiques, psychologiques et sociologiques de la motricité des êtres vivants, l'Homme en particulier.
Séminaires et évènements
Effets secondaires, charge cognitive et stress en réalité virtuelle (salle des thèses)
Alexis SOUCHET (IRT SystemX), invité par F. Sarlegna
Bio-Inspired joint design: Exploiting Morphogenesis and Evolutionary Adaptations of Synovial Joints
Kalenia MARQUEZ-FLOREZ (Postdoc Equipe SBI); Amphi FSS
Abstract:
Synovial joints have evolved in shape, dimensions, and tissue characteristics to endure a lifetime of load cycles while minimizing energy loss. Why not draw inspiration from these joints for mechanical design? Given that tissue characteristics are virtually uniform across all taxa and joints, it is the geometry (shape and dimensions) that adapts to the locomotion of each animal. In this talk, I will discuss how we explore the geometrical design principles of synovial joints to apply them to engineering joint design. For shape, we developed a generative design methodology inspired by the synovial joint morphogenesis process to shape contacting surfaces. In this process, cartilaginous bone rudiments grow locally, guided by hydrostatic and shear stress distributions. By mimicking these growth rules in an engineering context, we observed that it is viable to adapt contact surfaces to ensure uniform pressure distribution. Regarding dimensions, we formulated engineering joint sizing guidelines based on biological joint allometry. This involved analyzing the distal humerus dimensions of 110 quadrupedal animals and correlating them with the dynamic conditions experienced during galloping. Our findings indicate that joint dimensions have evolved across taxa to maintain consistent pressure, sliding speed, and fluid film lubrication, which are beneficial for tissue maintenance. This work provides insights into natural joint function, guiding the design of bio-inspired joints.
Acceptabilité des technologies de promotion de l’activité physique chez des populations vulnérables
Meggy Hayotte (Université Côte d'Azur, LAMHESS)
Les recherches de Meggy Hayotte (MCF, Université Côte d'Azur, LAMHESS) portent sur la promotion de l'activité physique à des fins de santé par les technologies auprès des populations vulnérables (e.g., patients atteints d'obésité, seniors). Ses travaux ont exploré les technologies visant à promouvoir l'activité physique selon deux axes : (a) les mécanismes d'acceptabilité des technologies (e.g., les mécanismes basés sur l'Unified Theory of Acceptance and Use of Technology-2 et enrichis par l'intégration de facteurs motivationnels issus de la théorie de l'autodétermination), et (b) les conditions d'efficacité de la technologie (e.g., les techniques intégrées de changement de comportement). L'objectif de cette présentation sera de présenter un bref historique des modèles d'acceptabilité des technologies, avec un focus particulier sur l'Unified Theory of Acceptance and Use of Technology-2, puis de présenter comment ce modèle peut être mobilisé dans le contexte de la promotion de l'activité physique à des fins de santé chez un public vulnérable, avant de conclure par des perspectives de recherche dans ce domaine.
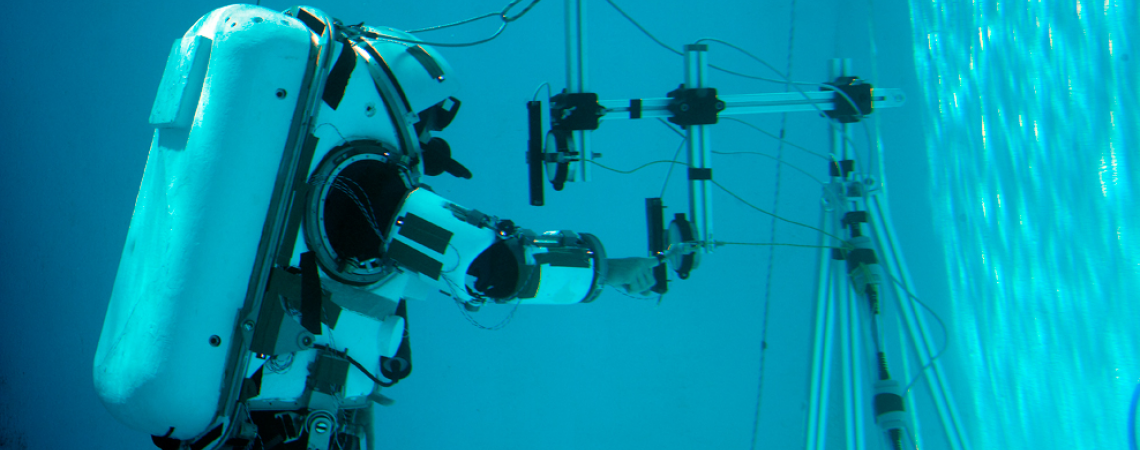
De l'utilisation des coordinations sensorimotrices pour une assistance robotique intuitive et écologique au geste (Salle des thèses FSS)
Nathanaël Jarrassé (ISIR, Sorbonne/CNRS), invité par Jozina De Graaf
Titre: De l'utilisation des coordinations sensorimotrices pour une assistance robotique intuitive et écologique au geste
Les robots sont des outils prometteurs pour assister les gestes humains, qu'ils soient ceux d'un utilisateur handicapé ou d'un opérateur dans l'industrie. Si des progrès importants ont été réalisés au cours des dernières décennies sur la partie matérielle de ces dispositifs robotiques, il reste un défi essentiel : offrir aux utilisateurs un contrôle intuitif et écologique de l'assistance de leur corps par ces dispositifs. Dans cet exposé, je présenterai donc des recherches que nous menons sur la caractérisation des coordinations motrices naturelles et leur réorganisation induite par une déficience ou l'interaction avec des robots ; et comment ces connaissances peuvent être utilisées pour développer une meilleure commande des robots de rééducation et d'assistance.
Site de N. Jérassé (ISIR, Sorbonne): https://www.n-jarrasse.fr/
Behavioral, Neuropsychological, and Computational Perspectives on Sensorimotor Learning (Salle des thèses FSS)
Jonathan Xiao Tsay (Carnegie Mellon, USA) invité par F. Sarlegna
Abstract:
Humans are remarkably adept at learning to use their bodies in a coordinated manner. Understanding how we acquire, adapt, and retain motor skills is one of the principal goals of cognitive neuroscience and remains a defining challenge for robotics and clinical rehabilitation. While it is well established that sensorimotor learning entails multiple implicit and explicit processes, the underlying computations and neural substrates governing these processes remain poorly understood. Drawing on my research ranging from fine-grain sensorimotor psychophysics to large-scale crowdsourced datasets (test yourself here: multiclamp-c2.web.app), I will highlight core neuropsychological constraints and novel computational insights into sensorimotor learning. This body of work offers a fresh perspective regarding the cerebellum’s role in cognition and action and has motivated a new hypothesis concerning how the cerebellum coordinates both our physical and mental kinematics.
Bio: I am an incoming assistant professor of psychology at Carnegie Mellon University (Sep 2024). I have a background in theoretical mathematics (B.A. from Northwestern University), physical rehabilitation (D.P.T. from Northwestern University's Feinberg School of Medicine), and cognitive neuroscience (Ph.D. from UC Berkeley). Our lab's mission is to understand how humans master a near-limitless repertoire of movements, from brewing coffee to parallel parking. To achieve this, we will use a wide range of methods like computational modelling, psychophysics, patient testing, and neuroimaging. We expect our findings to not only generate new insights into learning and memory but also optimize rehabilitation and improve human performance.
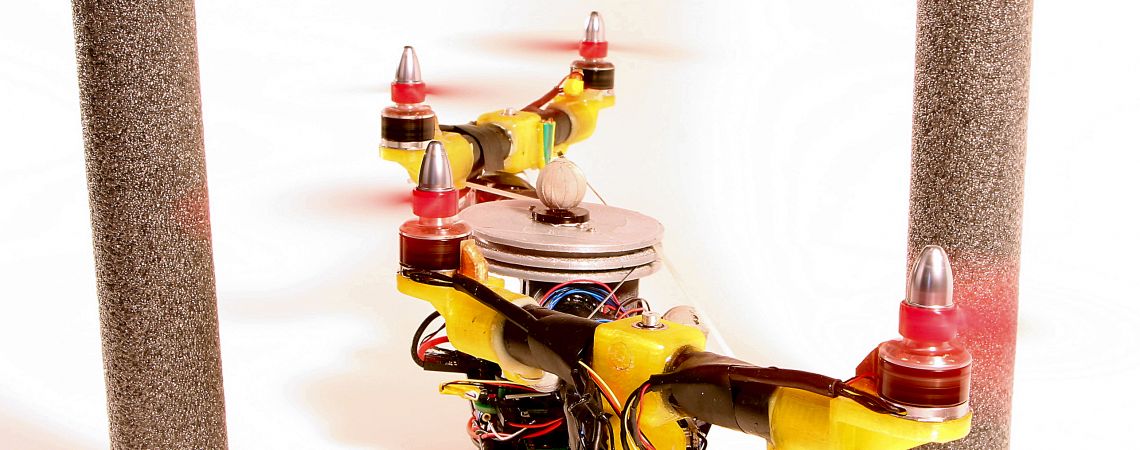
Robotique aérienne et interaction physique (Salle des thèses FSS)
Arda Yigit (postdoc Nantes), invité par F. Ruffier
Abstract : Dans la première partie de la présentation, j'aborderai mes travaux antérieurs, en particulier le robot aérien que j'ai développé lors de ma thèse et les robots parallèles collaboratives sur lesquelles j'ai travaillé lors de mon postdoctorat au Canada. Par la suite, je présenterai mon projet de recherche sur les robots aériens passivement reconfigurables.
Skeletal-Biomechanics - from fundamental research to biomimetic applications (Salle des thèses FSS)
Jan-Henings DIRKS (Hochschule Bremen - City University of Applied Sciences), invité par S. Arroyave-Tobon
Short Abstract
Many skeletal structures show fascinating evolutionary adaptations to all kinds of biomechanical challenges. Understanding the fundamental principles of these adaptations can be of great interest for bio-inspired applications. In this presentation I will show several examples of our recent work on various parts of the insect exoskeleton and the starfish skeletal system and discuss the importance of fundamental research for biomimetic projects.
Outils et Méthodes pour l'étude du comportement des conducteurs
Stéphane Espié (SATIE/MOSS, Gustave Effeil Univ.), invité par G. Perrotte
RÉSUMÉ :
La compréhension du comportement des conducteurs est un pré-requis pour la conception de contre-mesures de sécurité routières efficaces car acceptées. La conception d'outils utilisables pour étudier et modéliser le comportement des conducteurs est donc un enjeu important. La question est non seulement de reproduire les comportements actuels mais aussi d'anticiper sur ceux qui pourraient apparaître dans le futur suite à des changements dans le contexte de conduite.
L'instrumentation de véhicules et les tests sur route et / ou circuits est l'une des options, l'usage de simulateurs de conduite en est une autre. Dans tous les cas la question posée concerne la validité des outils utilisés, outils qui ne doivent pas biaiser les comportements observés.
La modélisation et la simulation des comportements de conduite peut être réalisée par des méthodes de régression ou d'émergence, la question de la simulation de situations "futures" (i.e. pour lesquelles il n'existe pas de données actuellement) est une question ouverte qui pose celle de la mise au point et de la validation des dispositifs de sécurité "futurs".
Dans notre présentation nous discuterons des outils et méthodes que nous utilisons et/ou développons dans le contexte spécifique aux deux roues motorisés. Nous discuterons bien sûr de leur application aux autres types de véhicules.
Caractérisation in vitro / in vivo du tissu musculaire
Sabine Bensamoun (Lab Biomécanique et Bioingénierie, UTCompiègne, Mayo Clinic Foundation), invité par M. Pithioux
Le muscle strié squelettique a une composition hiérarchique complexe. Pour mieux comprendre les liens entre les différentes échelles (macroscopique : muscle entier ; microscopique : fibre ; sous-microscopique : myofibrille) des protocoles expérimentaux sont développés pour mesurer les propriétés mécaniques (passive et active). Des muscles (lent : soleus ; rapide : EDL) extraits de souris saines et dépourvues du gène KLF10 (aussi appelé TIEG1 : TGFb Inducible Early Gene-1) sont analysés. Le gène KLF10 est impliqué dans plusieurs pathologies (ostéoporose, cardiomyopathie, ...), et bien que ce gène soit fortement exprimé dans le muscle squelettique, son implication dans le développement, la réparation ou la fonction musculaire est peu exploré. Nos récents résultats, sur l’impact de l’invalidation du gène KLF10 dans le muscle squelettique, ont montré un rôle crucial dans le maintien de l’homéostasie, la structure et la fonction des muscles squelettiques.
En parallèle à ce travail fondamental, les propriétés mécaniques in vivo des muscles de la cuisse (sain et pathologique : myopathie de Duchenne) ont été déterminées en développant des protocoles expérimentaux avec l’élastographie par résonance magnétique (ERM). Cette technique est basée sur l’analyse de la vitesse de déplacement des ondes au sein des tissus mous. En plus de l'acquisition des images anatomiques obtenues en IRM, la technique ERM permet de quantifier les propriétés mécaniques (élasticité, viscosité) du muscle. Les résultats ont montré une variation des propriétés mécaniques en fonction du vieillissement musculaire et en fonction de l’état du muscle (relâché ou contracté). Cette caractérisation par ERM permet de mieux comprendre l’évolution des propriétés mécaniques du muscle et de mieux adapter la modélisation de son comportement mécanique dans différentes situations physio-pathologiques.
Nous rejoindre
Lien vers nos offres
Appels à projet
A la Une
-
 Entrepreneuriat dans la Silver Economie (Rita Sleimen et Jean-Jacques Temprado)
Entrepreneuriat dans la Silver Economie (Rita Sleimen et Jean-Jacques Temprado)Rita Sleimen et Jean-Jacques Temprado organisent un colloque virtuel pendant le mois de la Silver Economie (Novembre) sur l'Entrepreneuriat dans la Silver Economie.
Il s'adresse à tous ceux qui veulent en savoir plus sur la silver économie et aux étudiants qui souhaitent développer un projet d'entreprise. Ce colloque vise également à attirer des étudiants vers le DU sur le même thème qui ouvrira en principe en Janvier 2024 (https://fss.univ-amu.fr/fr/entrepreneuriat-silver-economie).
5 conférences et table rondes programmées les mercredis de 17:30 à 19 h,
-
 Fête de la Science sur les ondes de Radio Grenouille ( Loic Chomienne)
Fête de la Science sur les ondes de Radio Grenouille ( Loic Chomienne)Écoutez ce podcast où vous pouvez retrouver Loïc Chomienne (Chercheur Post- Doctoral à l'Institut des Science du Mouvement) et le CRVM, qui ont partagé leurs expériences lors de la Fête de la Science sur les ondes de Radio Grenouille.
https://feeds.transistor.fm/les-sciences-de-la-grenouille/
-
 JNRR23
JNRR23Vous pouvez revoir ou regarder en direct ICI les conférences des JNRR23 (Journées Nationales de la Recherche en Robotique) qui se déroulent en ce moment du 15 au 20 octobre 2023 à Moliets dans les Landes. Plusieurs membres de l'ISM (Institut des Sciences du Mouvement) ont joué un rôle clé au sein du comité d'organisation, notamment sous la direction de Franck Ruffier.
https://www.youtube.com/@Institutdessciencesdumouvement/streams
-
 Course à pied : les « supershoes » permettent-elles de courir plus vite… sans danger ? (Guillaume Rao)
Course à pied : les « supershoes » permettent-elles de courir plus vite… sans danger ? (Guillaume Rao)Course à pied : les « supershoes » permettent-elles de courir plus vite… sans danger ?
Sur les cinq dernières années, la quasi-totalité des records du monde sur demi-fond, du 5 000 mètres au marathon, a été battue.
-
 Exposition : Science et sport, l’union fait la force (CNRS)
Exposition : Science et sport, l’union fait la force (CNRS)L'exposition « Sport et science, l’union fait la force » a été conçue par le CNRS en partenariat avec la RATP. Elle sera présentée sur le Village des sciences de Marseille les 14 et 15 octobre pour la Fête de la science.
-
 Le milieu du sport court-il toujours après l'égalité ? ( Maxime Travert )
Le milieu du sport court-il toujours après l'égalité ? ( Maxime Travert )Les stéréotypes de genre ont la peau dure dans le milieu du sport. Echangez avec Bénédicte Gastineau, Démographe de l'IRD au sein du LPED ; Maxime Travert, Professeur des universités en STAPS à Aix-Marseille Université (INSPE, ISM, AMU/CNRS) ; et Carla Cote, Emma Riouffret, Tiffany Verchère, sportives de haut niveau.
+d'infos ICI
rencontre au village des sciences de Marseille :
Dimanche 15 octobre, à 11 h
Place Bargemon, Hôtel de Ville de Marseille
-
 France 3 - Joe Kals et Neurogel en Marche (Patrick Decherchi)
France 3 - Joe Kals et Neurogel en Marche (Patrick Decherchi)Voici un reportage signé France 3 région Provence Alpes Côte d'Azur (PACA) Avec la présentation de JOE KALS et son combat pour faire avancer les choses à travers ses exploits sportifs. Vous trouverez aussi la présentation de l'association de recherche sur la moelle épinière neurogel en marche qui montre les résultats de l'essai pré-clinique réalisé à l'université d'Aix-Marseille .
-
 HDR - OLIVIER VORS
HDR - OLIVIER VORSRetrouvez la captation de la magnifique soutenance HDR de Olivier VORS ci dessous.
Pages
A voir ou à revoir






























![]()
![]()
![]()
Institut des Sciences du Mouvement Etienne-Jules Marey | Aix Marseille Université - Tous droits réservés - Mentions légales